Problem Statement:
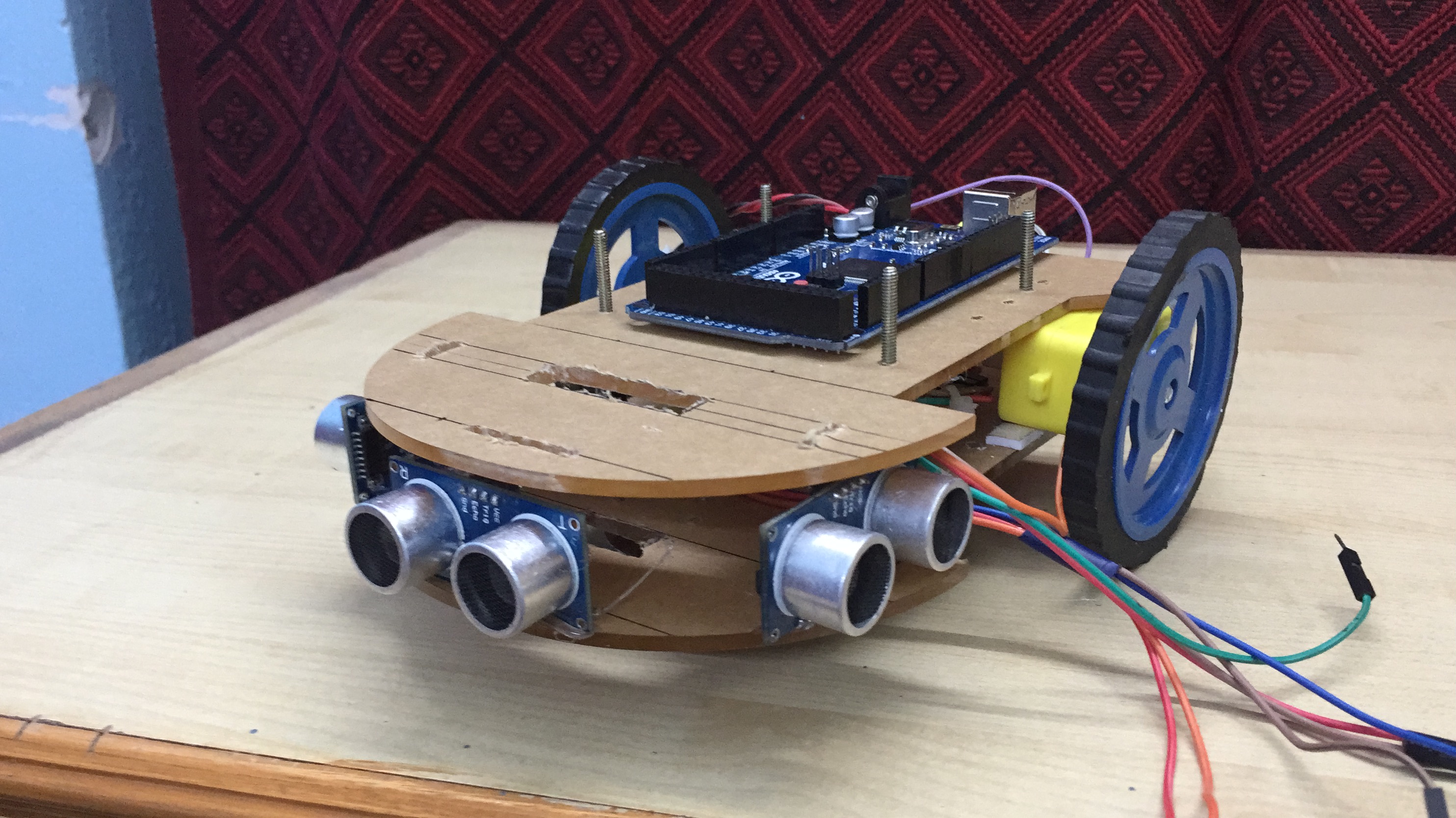
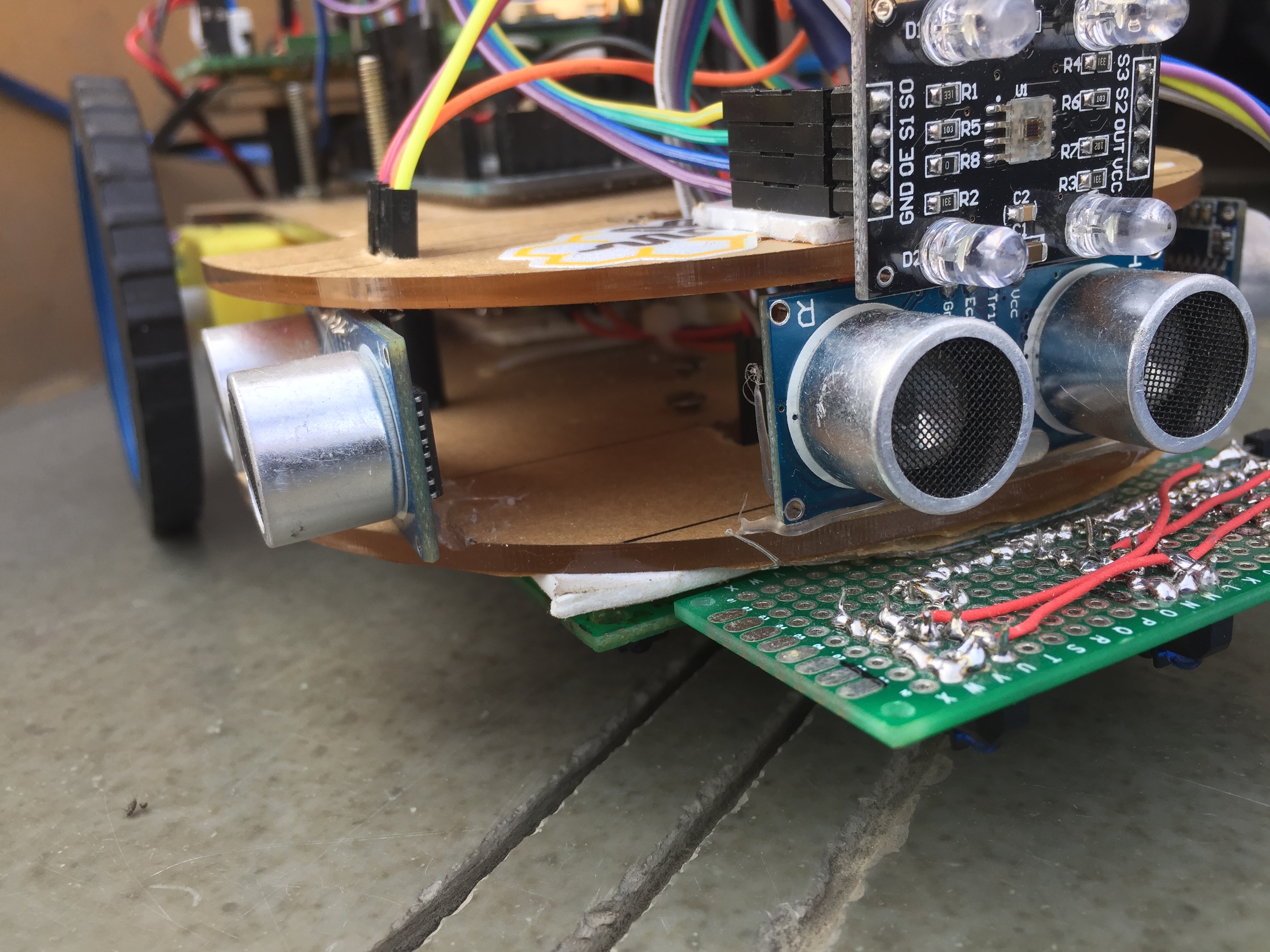
Design a fully autonomous robot to follow a black/white line on a white/black surface and then follow a rigid wall either on the left, right or both sides. While following a line, avoid blue colored obstacles by circumventing them from the left and avoid red colored obstacles by circumventing them from the right.
Design Parameters:
| Compute |
|
|---|---|
| Sensors |
|
| Power |
|
Project Code: