Github Repository
https://github.com/karpenet/IARCbot
Problem Statement
Design a fully autonomous robot to follow a black/white line on a white/black surface and then follow a rigid wall either on the left, right or both sides. While following a line, avoid blue colored obstacles by circumventing them from the left and avoid red colored obstacles by circumventing them from the right.
Design Parameters
Compute
- Arduino Mega 2560
Sensors
- 1x TCRT 5000, 5 Sensor Main Array
- 1x TCRT 5000, 3 Sensor Aux Array
- 3x HC-SR04 Ultrasonic Sensors
- 1x TCS3200 RGB Color Sensor
- 1x MPU6050 6-DOF IMU
Power
- 3S 2000 mAh Li-Ion Battery
- Custom Power Distribution and User Interface Board
 |
 |
|---|---|
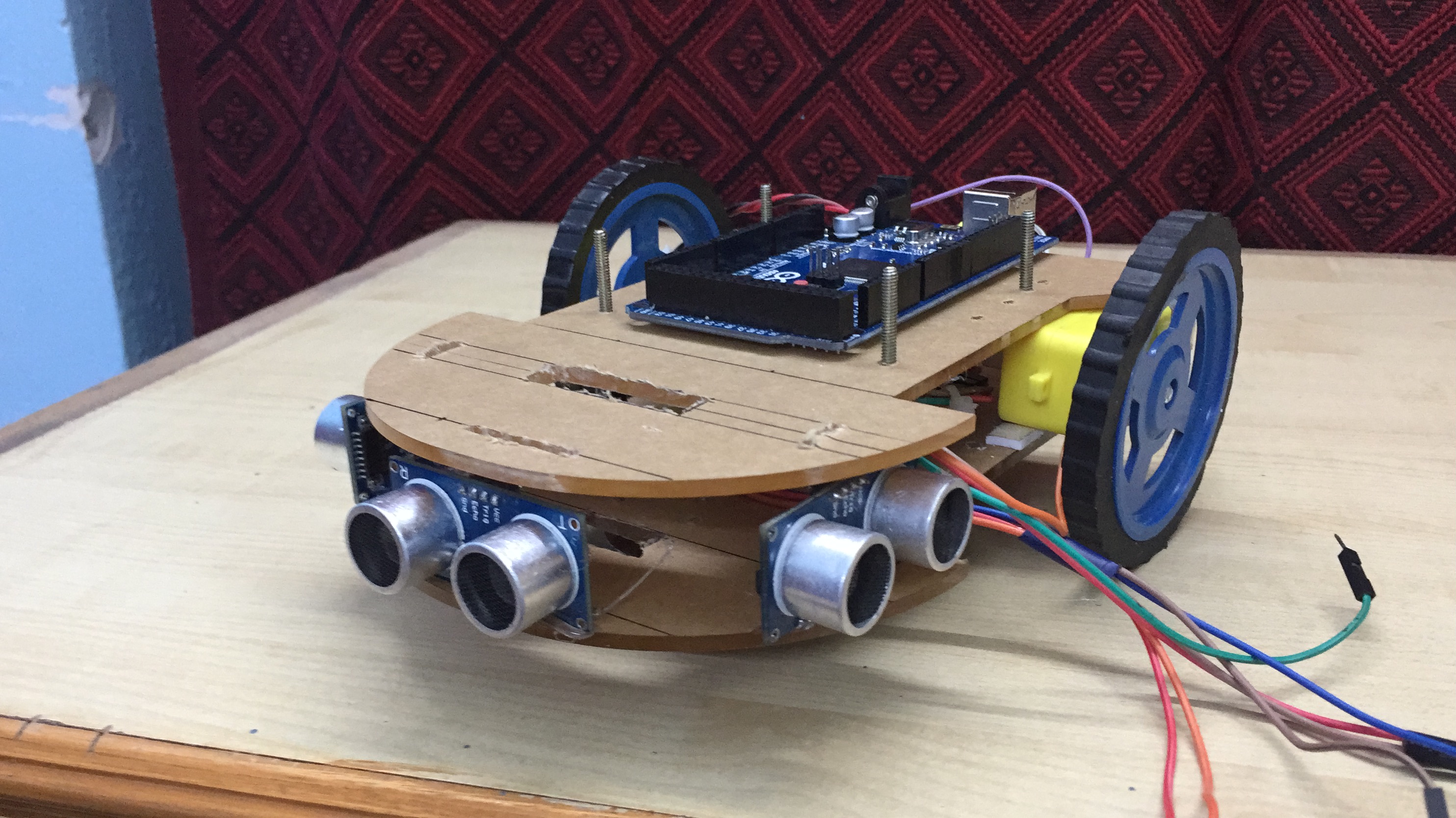
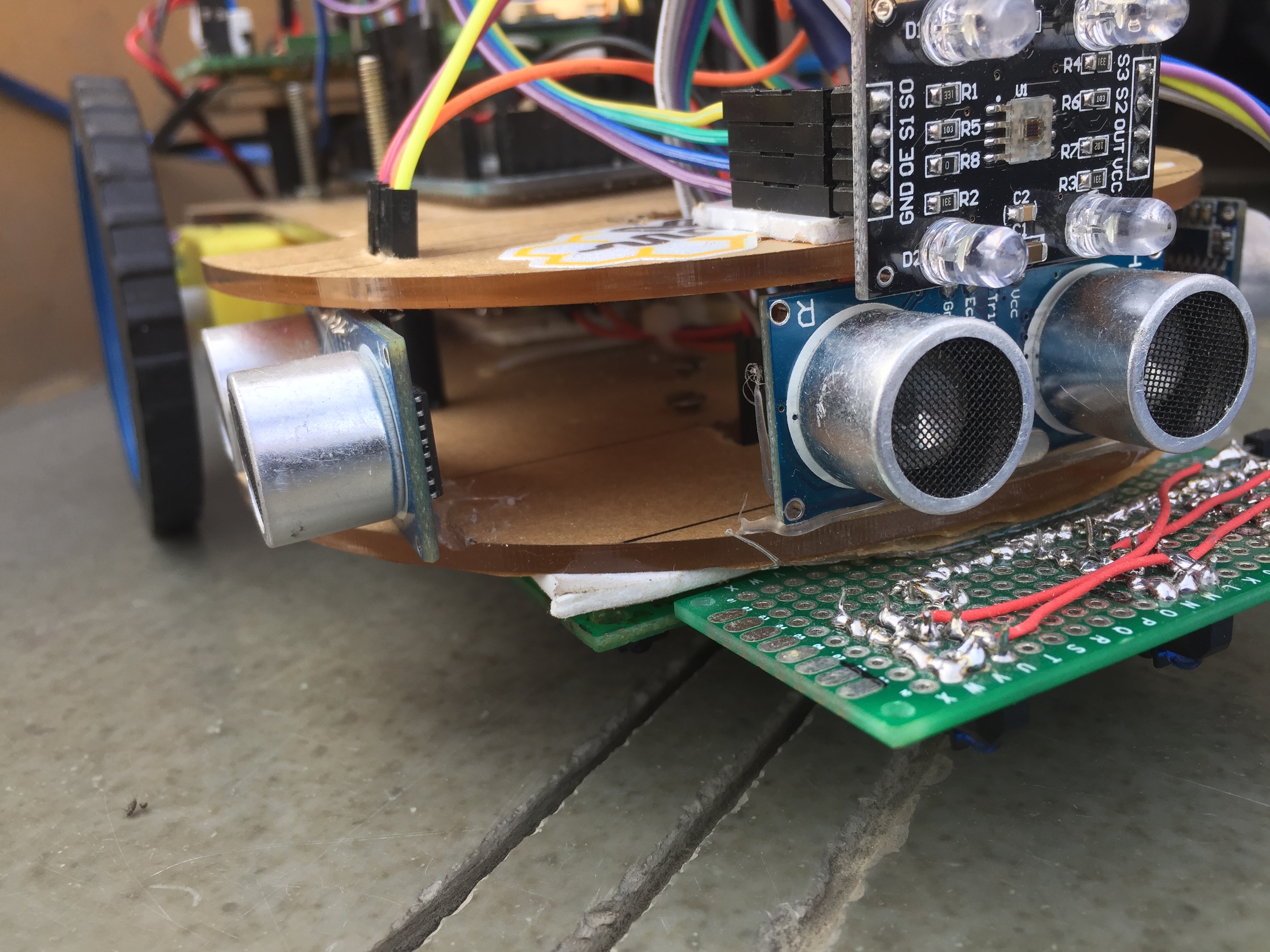
| Custom lasered acrylic chassis of the IARCbot | Fully assembled robot |
 |
|---|
| IARCbot in action at Techkriti 2018, IIT Kanpur |