Introduction:
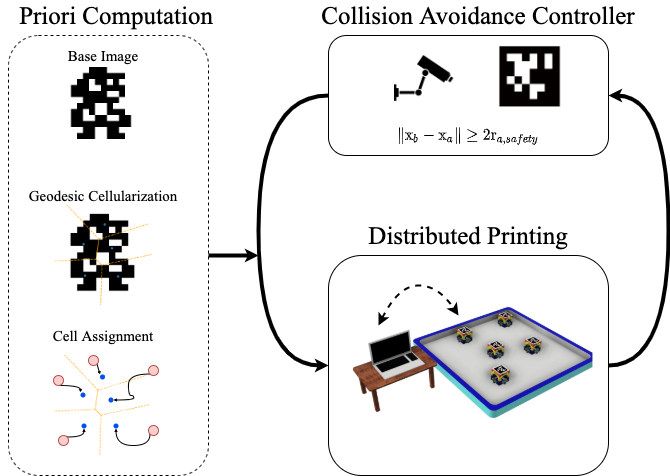
In this work, we consider the problem of large-format printing using a group of homogenous mobile robots. We approach this problem using an optimization method which decomposes an image into rasterized geodesic cells and allocates them to the robot team for printing.
Problem Definition:
The aim is to minimize the total printing cost, which is the maximum cost amongst all robots:\begin{equation}\text{minimize} \max (T_1, T_2, T_3, ..., T_\mathcal{N})\end{equation}
The Geodesic Image Cellularization Algorithm:
$$\begin{align}\underset{\mu, W}{\text{minimize}} \quad & \sum_{m=1}^{\mathcal{M}} \sum_{n=1}^{\mathcal{N}} W_{mn}(\frac{1}{2} \|\mathrm{x}_m - \mu_n\|^{2}_{2}) \label{eqn:cnst1}\\ \textrm{subject to} \quad & \sum_{n=1}^{\mathcal{N}} W_{mn} = 1 , m = 1, ..., \mathcal{M} \label{eqn:cnst2}\\ & W_{mn} \geq 0, m = 1, ..., \mathcal{M}; n = 1, ..., \mathcal{N} \label{eqn:cnst3}\\ & \sum_{m=1}^{\mathcal{M}} W_{mn} \geq \left \lfloor \frac{\mathcal{M}}{\mathcal{N}} \right \rfloor , n = 1, ..., \mathcal{N} \label{eqn:cnst4} \end{align}$$
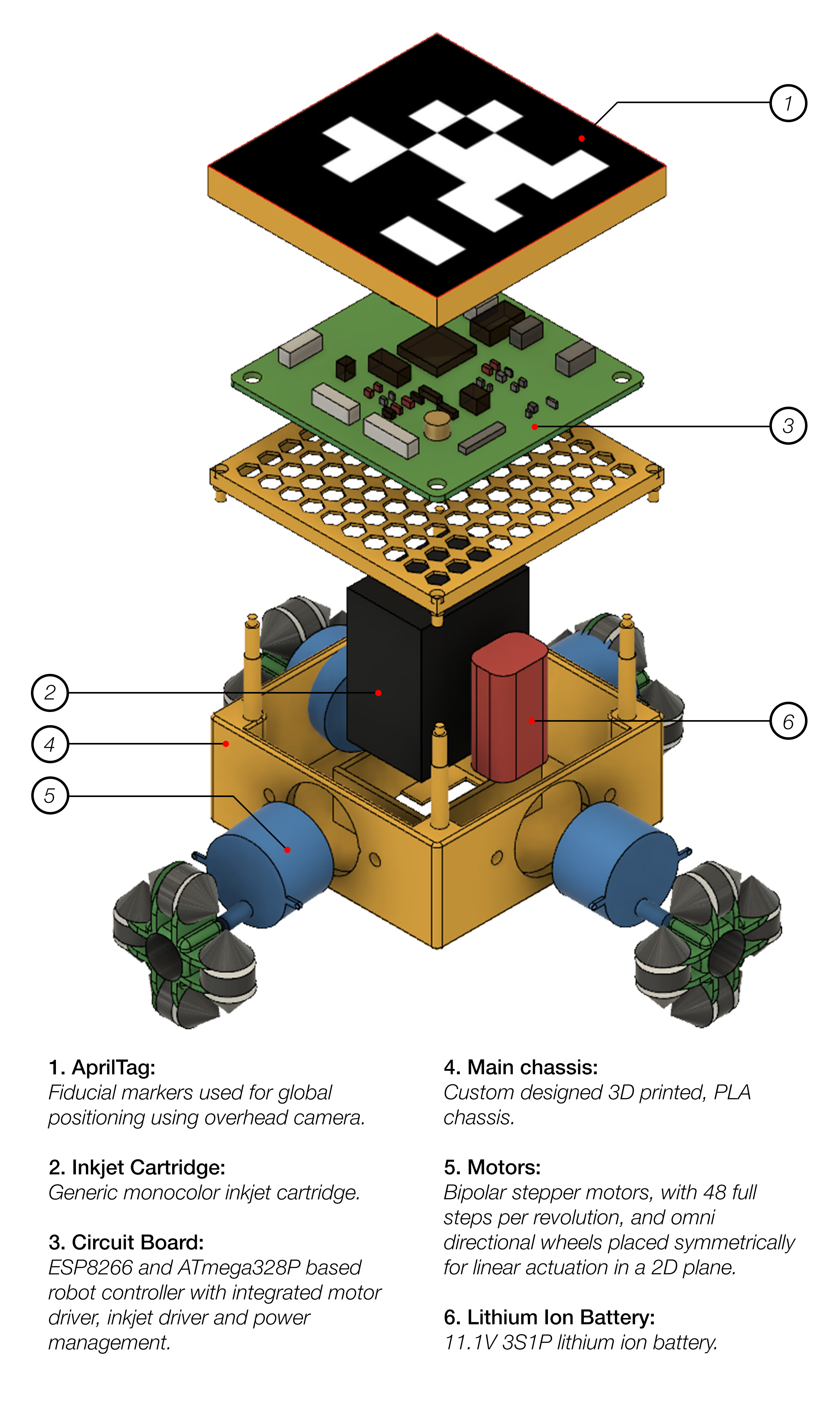
Robot Design:
Experiments:
Publications:
- Karpe, K., Chatterjee, A., Srinivas, P., Samiappan, D., Ramamoorthy, K., Sabattini, L.: Sprinter: A discrete locomotion robot for precision swarm printing. In: 2019 19th International Conference on Advanced Robotics (ICAR), pp. 733–738. IEEE (2019)
- Karpe, K., Sinha, A., Raorane, S. Chatterjee, A., Srinivas, P., Sabattini, L.: Towards Optimized Distributed Multi-Robot Printing: An Algorithmic Approach