Bimanual Manipulation with VLA
Finetuning GR00T N1 and Pi0
Hello! I'm Kedar Karpe.
I'm a graduate student at the
GRASP Lab, University of Pennsylvania.
I'm also the founder of
Beeclust Multi-Robot Systems Lab
Finetuning GR00T N1 and Pi0

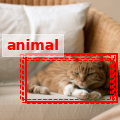
Semantic Segmentation with Transformers
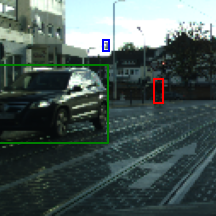
Multi Object Detection and Tracking

1/10 Scale Autonomous Racing
Object Detection using Deep Convolutional Networks
Towards Real-Time Object Detection with Region Proposal Networks
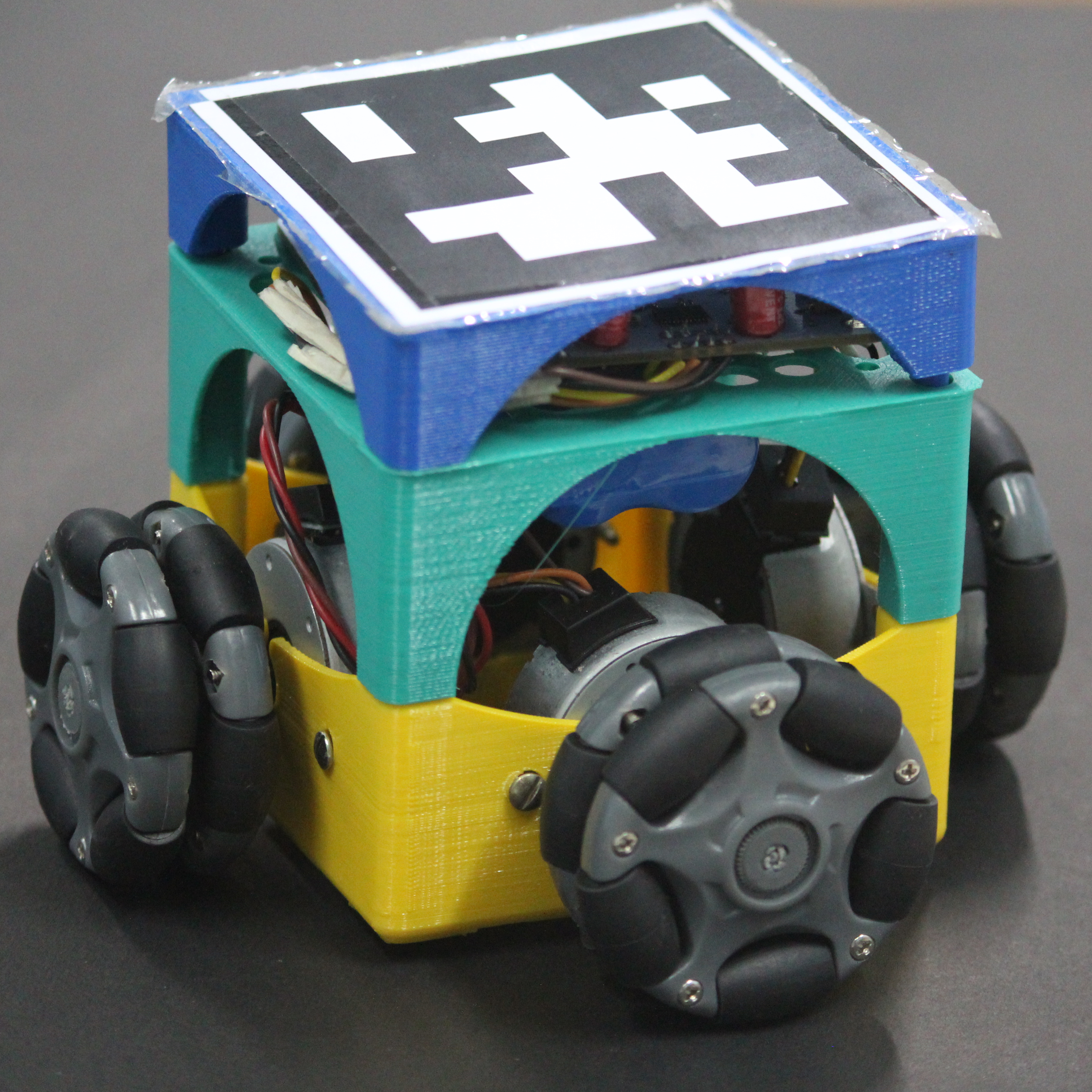
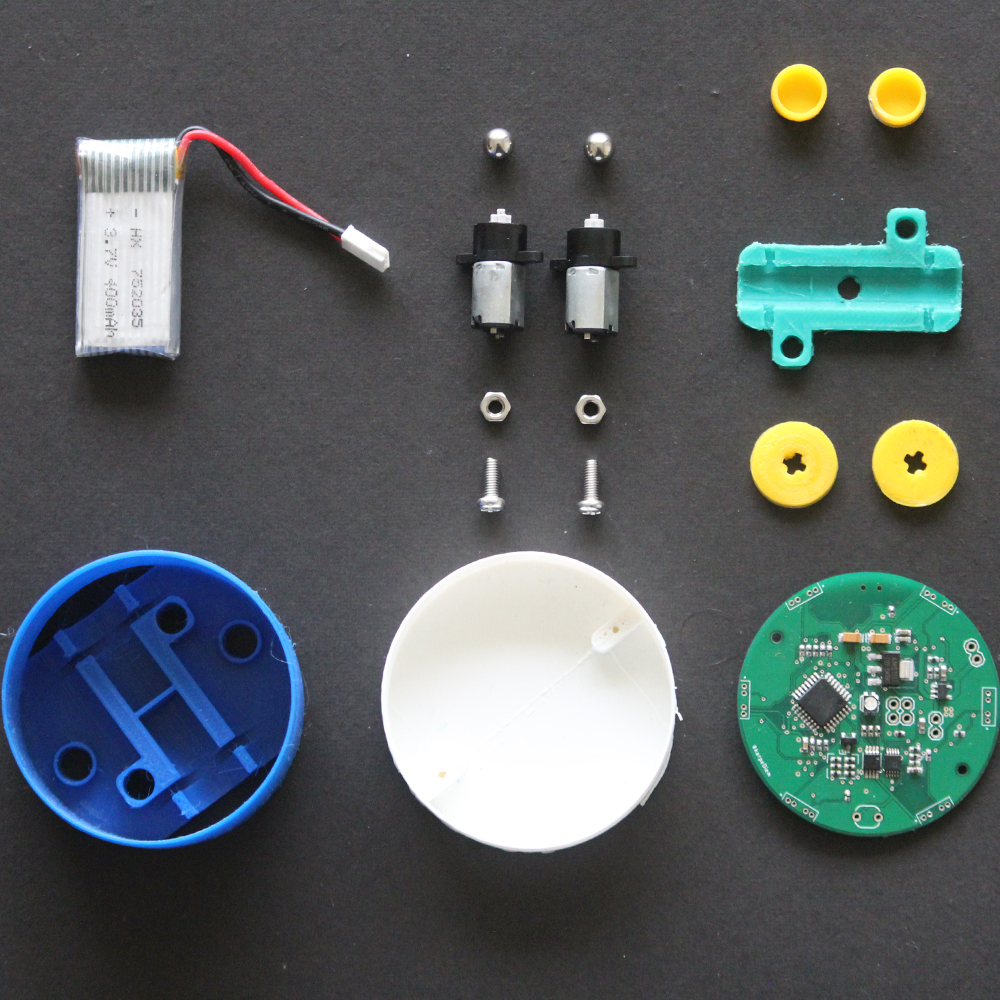
A Discrete Locomotion Robot for Precision Swarm Printing
A DIY Testbed for Research in Multi-Robot Systems
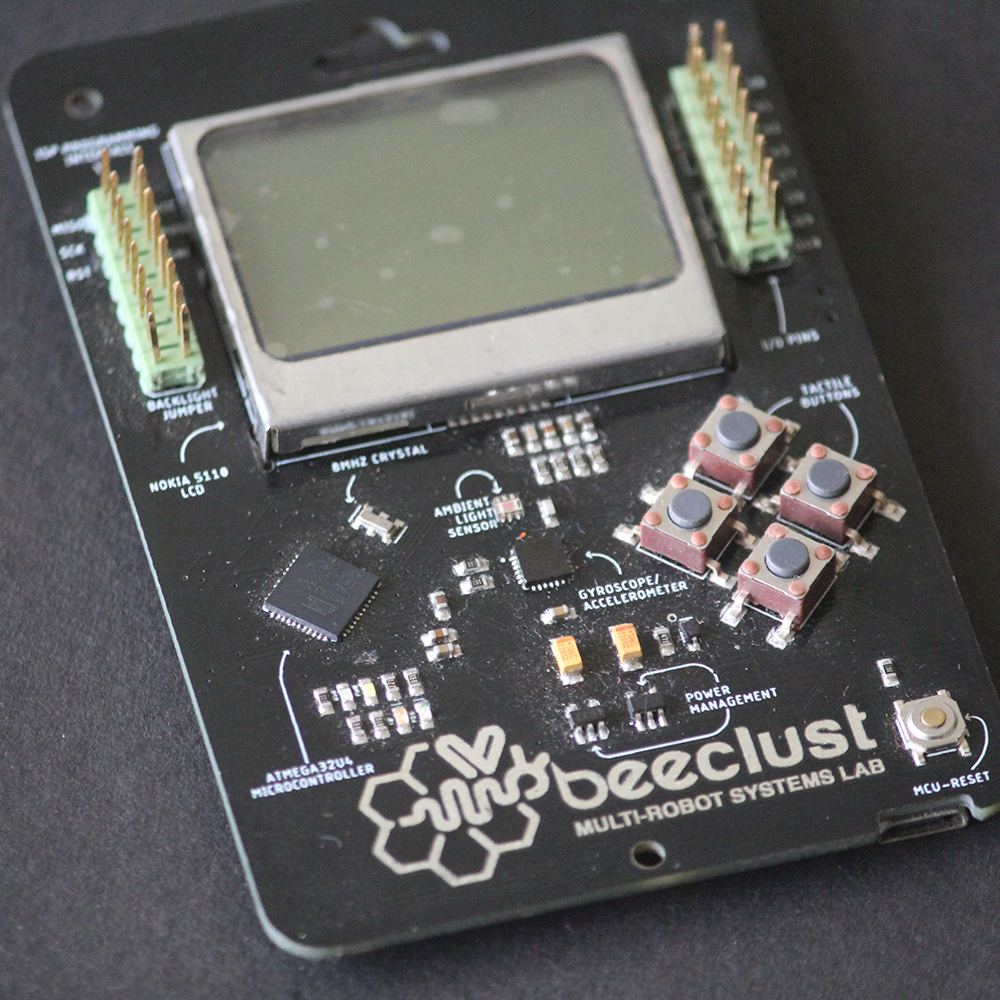
An Arduino Based ID Card on a Printed Circuit Board
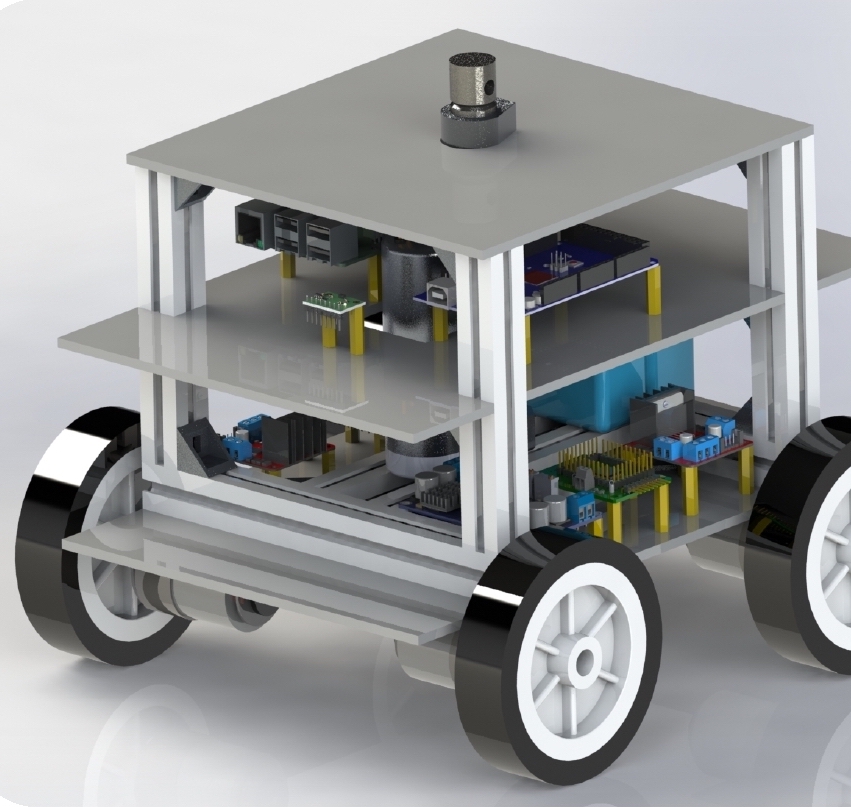
A Skid-Steered Platform for Multi-Robot Payload Transport
An Advanced Line, Wall, Color Tracking Robot